
Форштевень, сияющее продолжение киля, стремительно взмывающее вперед, формирует носовую водонепроницаемую

Классификация ледоколов Зачастую, специалисты в данной области предпочитают классифицировать ледоколы
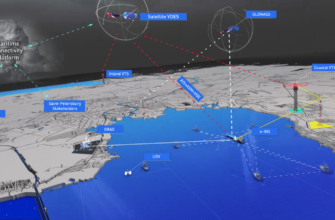
Описание навигационного сообщения ГЛОНАСС, глобальная навигационная спутниковая система, ставшая ключевой

История создания История создания ледокола «Сибирь» пронизана трудами, амбициями и гениальностью

История создания атомных ледоколов Зарождение идеи атомных ледоколов датируется серединой XX века, когда

Проект ледокола «Ленин» Заслуживающий внимания проект ледокола «Ленин», представляет

История создания ледокола Зарождение идеи создания мощного ледокола, способного преодолеть многометровые
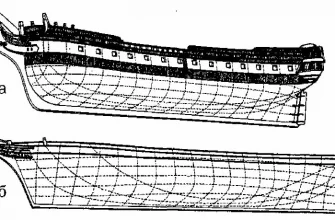
Значение для судна Форма корпуса судна определяет его внешний вид и геометрические параметры, такие как